
dans les murs où de masquer des fils électriques au
plafond pour éclairer notre intérieur. L'ampoule du futur
flottera dans les airs comme celle de Chris Rieger,
un étudiant américain de l'université du Queensland.
 De plus en plus de designers et d’ingénieurs cherchent des
De plus en plus de designers et d’ingénieurs cherchent des
 Lors du concours Red Dot Design 2011, des designers
Lors du concours Red Dot Design 2011, des designers LG Chem vient de révéler un prototype de batterie qui
LG Chem vient de révéler un prototype de batterie qui
 Le designer Jason Giddings a inventé un nouveau
Le designer Jason Giddings a inventé un nouveau Après avoir fabriqué pour Microsoft la première table tactile
Après avoir fabriqué pour Microsoft la première table tactile

 Une firme dénommée Cambridge Silicon Radio (CSR) vient de
Une firme dénommée Cambridge Silicon Radio (CSR) vient de Un designer russe a développé une souris
Un designer russe a développé une souris Quitter son logement en oubliant de fermer la porte à clé est le
Quitter son logement en oubliant de fermer la porte à clé est le Le constructeur Toyota ne construit pas uniquement des
Le constructeur Toyota ne construit pas uniquement des
Informations générales
| |
Modèle
|
Spykee Cell (Meccano)
|
Norme
|
CE
|
Age
|
A partir de 8 ans
|
Eco-participation
|
0,042€ (Le prix tient compte de cette taxe)
|
Informations techniques
| |
Dimension
|
25 x 25 x 25 cm
|
Notice et outils de montage
|
Fournis
|
Piles
| |



 Robotique pédagogique
Robotique pédagogique Les institutions les plus connues dont la recherche en robotique est l'un des buts sont : Defense Advanced Research Projects Agency (DARPA), aux États-Unis ; National Robotics Initiative (NRI), aux États-Unis ; Centre national de la recherche scientifique (CNRS), en France ; National Institute of Advanced Industrial Science and Technology (NIAIST), au Japon. Auxquels il faut ajouter des
Les institutions les plus connues dont la recherche en robotique est l'un des buts sont : Defense Advanced Research Projects Agency (DARPA), aux États-Unis ; National Robotics Initiative (NRI), aux États-Unis ; Centre national de la recherche scientifique (CNRS), en France ; National Institute of Advanced Industrial Science and Technology (NIAIST), au Japon. Auxquels il faut ajouter des  Les cartes électroniques (ou circuits imprimés) sont, par personnification, le cerveau du robot. C'est dans cette carte que le programme sera envoyé.
Les cartes électroniques (ou circuits imprimés) sont, par personnification, le cerveau du robot. C'est dans cette carte que le programme sera envoyé. Les robots à roues sont les plus simples à fabriquer. Il suffit de relier un moteur électrique à la roue via un train d'engrenages, ou un système poulies/courroies.
Les robots à roues sont les plus simples à fabriquer. Il suffit de relier un moteur électrique à la roue via un train d'engrenages, ou un système poulies/courroies. Les chenilles, comme celles que l'on peut voir sur les chars de combat, fournissent de plus grandes possibilités de franchissement que les roues. Par exemple, la supériorité des chenilles est flagrante pour franchir les fossés, ou les coupures de terrain.
Les chenilles, comme celles que l'on peut voir sur les chars de combat, fournissent de plus grandes possibilités de franchissement que les roues. Par exemple, la supériorité des chenilles est flagrante pour franchir les fossés, ou les coupures de terrain.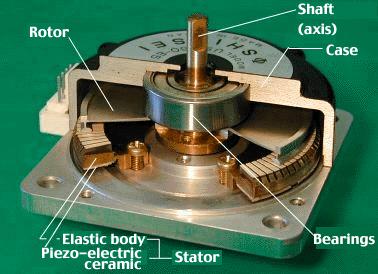 La piézoélectricité (du grec piézein presser, appuyer) est la propriété que possèdent certains corps de se polariser électriquement sous l’action d’une contrainte mécanique et réciproquement de se déformer lorsqu’on leur applique un champ électrique. Les deux effets sont indissociables.
La piézoélectricité (du grec piézein presser, appuyer) est la propriété que possèdent certains corps de se polariser électriquement sous l’action d’une contrainte mécanique et réciproquement de se déformer lorsqu’on leur applique un champ électrique. Les deux effets sont indissociables. Les moteurs sont, traditionnellement, les «muscles» d'un robot. Il permettent de réaliser la plupart des mouvements d'un robot, bien que ce ne soient pas les seuls actionneurs capable de le faire bouger. Le mouvement créé est rotatif.
Les moteurs sont, traditionnellement, les «muscles» d'un robot. Il permettent de réaliser la plupart des mouvements d'un robot, bien que ce ne soient pas les seuls actionneurs capable de le faire bouger. Le mouvement créé est rotatif. Les actionneurs servent à effectuer différentes actions, différents ordres. Les ordres sont transmis par l'intermédiaire du système de contrôle via les sorties. Les différentes actions possibles sont :
Les actionneurs servent à effectuer différentes actions, différents ordres. Les ordres sont transmis par l'intermédiaire du système de contrôle via les sorties. Les différentes actions possibles sont : Symbole d'un interrupteur ouvert
Symbole d'un interrupteur ouvert Un robot fonctionne généralement avec un grafcet. Prenons le cas d'un robot simple : Il avance jusqu'à ce qu'il rencontre un obstacle.
Un robot fonctionne généralement avec un grafcet. Prenons le cas d'un robot simple : Il avance jusqu'à ce qu'il rencontre un obstacle. Le capteur va envoyer une information, telle que la présence d'un objet ou une distance, cette information sera interprétée par le programme qui enverra un ordre à un actionneur, la plupart du temps un moteur afin de faire un mouvement, mais cela peut aussi être une LED, un haut-parleur…
Le capteur va envoyer une information, telle que la présence d'un objet ou une distance, cette information sera interprétée par le programme qui enverra un ordre à un actionneur, la plupart du temps un moteur afin de faire un mouvement, mais cela peut aussi être une LED, un haut-parleur… La robotique est l'ensemble des techniques permettant la conception, la réalisation de machines automatiques ou de robots1.
La robotique est l'ensemble des techniques permettant la conception, la réalisation de machines automatiques ou de robots1. Le GIF animé est né en même temps que l’ère numérique. Mais ce projet de flipbook mécanique replace le GIF dans l’ère analogique. En combinant l’animation image par image et la sculpture cinétique, l’artiste américain Juan Fontanive crée une boucle infinie comme un GIF animé.
Le GIF animé est né en même temps que l’ère numérique. Mais ce projet de flipbook mécanique replace le GIF dans l’ère analogique. En combinant l’animation image par image et la sculpture cinétique, l’artiste américain Juan Fontanive crée une boucle infinie comme un GIF animé.


 La sécurité des personnes et des biens est devenue, à raison, un fondement de toute action, technique ou autre, dans une entreprise. L’accident n’est plus considéré comme une fatalité; les actions des travailleurs doivent être analysées et les risques d’accidents perçus , mesurés afin d’éviter tout dommage physique et/ou psychologique. A cet aspect humain se joint l’aspect protection des installations et de l’environnement.
La sécurité des personnes et des biens est devenue, à raison, un fondement de toute action, technique ou autre, dans une entreprise. L’accident n’est plus considéré comme une fatalité; les actions des travailleurs doivent être analysées et les risques d’accidents perçus , mesurés afin d’éviter tout dommage physique et/ou psychologique. A cet aspect humain se joint l’aspect protection des installations et de l’environnement.














